
Robot End Effector Ppt
‘ambler’ keep 3 legs on ground. It is attaches to the wrist of the robot arm enables robot to perform a specific task.

{kind=link}


Robotics timeline 1922 czech author karel capek wrote a story called rossum’s universal.
Robot end effector ppt. 41 a.n.khudaiwala (l.m.e) g.p.porbandar 42. Manipulator adalahbagianmekanik yang dapatdifungsikanuntukmemindah, mengangkat, danmemanipulasibendakerja. Overload protection when some unexpected event happens to the end effector such as a part becoming stuck in a die or a tool caught in a moving conveyor.
Introduction to robotics a common view : Robot/end effector interface physical support during the work cycle 3. Thus to use this specification the user must know weight of the end effector.
These robots are commonly used in assembly tasks and can trace concentric cylinders in 3d space. Agenda introduction to robotics classification of robots robot accessories robot coordinates work volumes and reference frames robot programming robot applications in lean mfg. Whatever the cause, the consequences involve possible damage to the end effector or maybe even the robot itself.
One kinematic chain support the end effector. • there are two main types of end effectors: The grippers and tools are the two significant types of end effectors.
One that approaches infinity) •if we want the end effector to attain a certain velocity, we need to input an infinite joint velocity •not a great idea! E.g., if the gross load carrying capacity of a robot is 10.0 kg and it’s end effector weigh 3.0 kg, then the net load carrying capacity of the robot would be only 7.0 kg. Whatever the cause, the consequences involve possible damage to the end effector or maybe even the robot itself.
Motoman sk120 manipulating glass sheets 17. The controller controls the movement of the manipulator and end effector. When some unexpected event happens to the end effector such as a part becoming stuck in a die or a tool caught in a moving conveyor.
40 a.n.khudaiwala (l.m.e) g.p.porbandar 41. Inside the body of a robot small motor is present known as actuators. In robotics, an end effector is the device at the end of a robotic arm, designed to interact with the environment.
Spherical robot spherical robots have two orthogonal rotational r axes, with variables 1 and 2, and one p joint, variable radius l3. Of robot (max 6) mobile robot on plane can reach position described by 3 d.o.f., but if robot has fewer d.o.f. End effector yang melakukantugas yang diinginkan, sepertimisalnya grip.
• the end effectors must be custom engineered for the particular task which is to be performed. Robot moves in reaction to feedback from sensors with the help of actuators. Lower end‐effector precision in position and orientation.
Robot/end effector interface physical support during the work cycle 3.overload protection. Manipulator singularities are hard to visualize. • an end effector is the device that is at the end of a robotic arm.
Powershow.com is a leading presentation/slideshow sharing website. Both the hardware and software are the controllers of the robot. A velocity with some finite value) may correspond to an unbounded joint velocity (i.e.
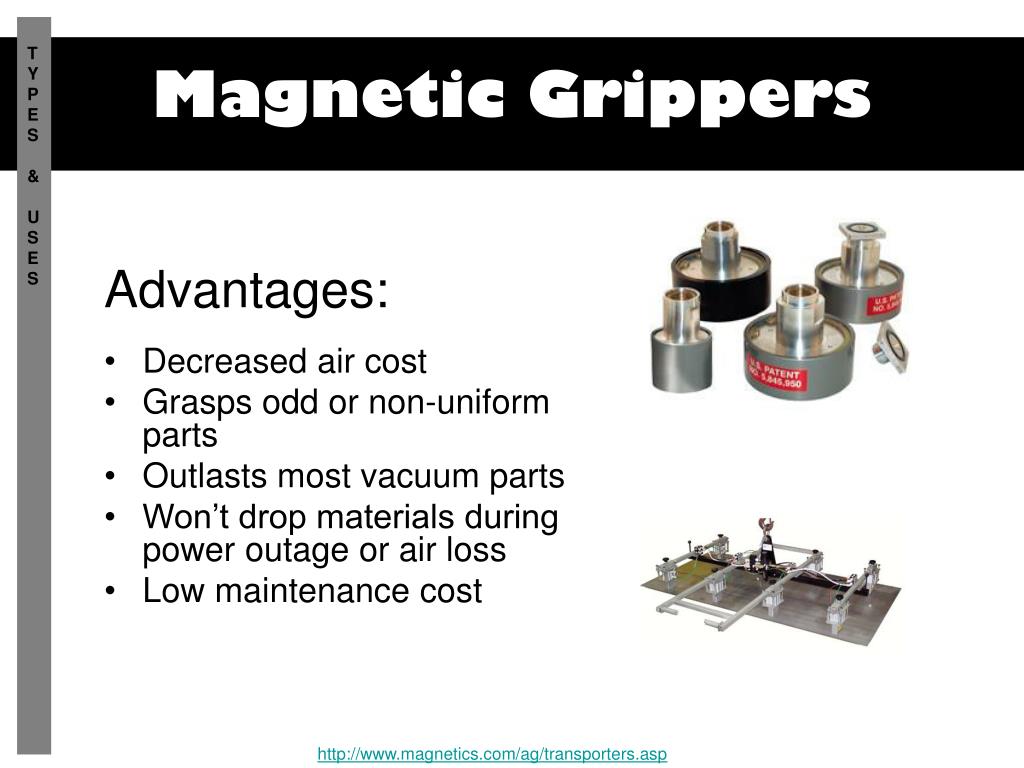
The grippers are used to pick and place an object, while the tools are used to carry out operations like spray painting, spot welding, etc. A hand of a robot is considered as end effectors. The end effector is also designed such that to lift the sheet we use suction cups were the sheet is uplifted with a certain pressure.
The controller is the brain of a robot. Robot programming revisited • robot programming is the defining of desired motions so that the robot may perform them without human intervention. Of end effector is determined by d.o.f.
The payload to self weight ratio is much is small. Robots as humanoids we will be studying industrial manipulator type robots. Synonyms of end effector are end of arm tooling (or eoat), robot peripherals or robot accessories although these last two terms are not as precise and can include devices that are not necessarily installed and the end of the robot arm.
If we use spherical coordinates for the position and direction cosines for the orientation we will obtain one jacobian (12 for 6 dof robot) very different from the one that results from cartesian coordinates for the position and euler parameters for the orientation (7 x 6 matrix for a 6 dof robot). •a bounded end effector velocity (i.e. End effector is a generic term that includes all the devices that can be intalled at a robot wrist.


Posting Komentar untuk "Robot End Effector Ppt"